Introduction
With the recent release of Chapter 14 of the Code of Federal
Regulations Part 107 regulating commercial small unmanned aircraft systems
(sUAS) weighing less than 55 pounds and operating within visual line of sight,
the Federal Aviation Administration (FAA) has opened the door to a massive
aviation industry. As part of the new regulations, the FAA takes great care to
preserve the safety of all aircraft in the National Airspace System (NAS),
which includes maintaining the requirement to both see and avoid other
aircraft. To satisfy this requirement, the FAA currently requires all sUAS to
be flown within visual line of sight (VLOS). The next regulatory hurdle will be
to regulate UAS flights flown beyond line of sight (BLOS). Currently, the
distinction in regulations will not depend on aircraft size, but on the type of
operation as determined by altitude and speed (Elias, 2016). For the purposes
of this paper and a best guess based on current regulations, the following
segments of UAS will be analyzed:
·
Category 1: sUAS flown within VLOS below 400’
above ground level (AGL)
·
Category 2: sUAS flown BLOS below 400’ AGL
(below controlled airspace of the NAS)
·
Category 3: UAS flown above 400’ AGL with max
airspeed less than 100 kts (within controlled airspace of the NAS)
·
Category 4: UAS flown above 400’ AGL with max
airspeed greater than 100 kts
(These categories may not reflect the actual regulations,
but are based on available predictions of FAA intentions)
General
Considerations
Of these categories, some UAS airframe types will require
additional consideration to satisfy separation of manned and unmanned aircraft.
All current UAS are smaller than their manned aircraft counterparts, due to the
lack of a cockpit. Regardless of shape, their smaller visual profiles will not
provide pilots of manned aircraft with accurate references to estimate distance,
and their small profiles and mostly composite construction does not provide
passive radar systems with a sufficient profile to enable accurate resolution
(Strain, DeGarmo, Moody, 2007).
Fixed-wing airframes present a challenge to aircraft
separation because of their necessary forward speed to maintain flight.
Fixed-wing aircraft on a converging path are not able to simply “put on the
brakes” and yield to one another, and the visual judgement of distance and
speed is largely based on the size of the aircraft.
Technology use in
Manned Aircraft
A traffic collision avoidance system (TCAS) is available for
use in manned aircraft, and required for turbine-powered aircraft carrying more
than 10 passengers (FAA, 2011). Of the available TCAS systems within the U.S.,
TCAS I provides pilots with traffic advisories (TA) to assist with visual identification
of other aircraft, and TCAS II adds resolution advisories (RA) that provide
recommendations for escape maneuvers to increase vertical separation (climb or
descend). TCAS depends on the same transponder signals that aircraft use to
provide monitoring stations with altitude and aircraft information. As a matter
of fact, the FAA states that “…TCAS provides no protection against aircraft
that do not have an operating transponder.” TCAS systems use standardized
display symbols to show the position of other aircraft in the vicinity, usually
as an overlay on a secondary moving map display (FAA, 2011).
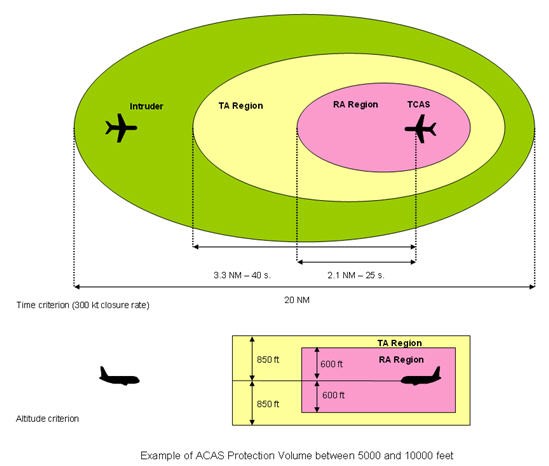 |
| Figure 1. TCAS Volume. Eurocontrol: http://www.eurocontrol.int/msa/public/standard_page/ACAS_Overview_Principles.html |
The Automated Dependent Surveillance-Broadcast (ADS-B)
system is an additional technology that will be required for all manned
aircraft starting in 2020. Equipment for both commercial and general aviation
aircraft has already been made available for installation, often as a
compliment to a pre-existing TCAS. ADS-B uses different frequencies than the
transponder/TCAS system, and provides similar but better information.
Applications for
Unmanned Aircraft
Category 1: sUAS in this category are commercially
regulated. For sUAS flights in Category 1, an ADS-B receiver is recommended for
situation awareness of any manned aircraft in the immediate area. For about
$35, a simple 1090 MHz receiver USB dongle can be connected to an antenna, and
any ADS-B or transponder signals coming from transmitting aircraft can be
depicted on a computer display (RTL-SDR.com, 2013). Another possible
application of this low-cost system is the potential for the sUAS GPS position
as reported to a computer-based ground station to be sent to the ADS-B system
via internet connection, and re-transmitted to airborne aircraft using ADS-B
receivers. This is not a “true” ADS-B solution, but does provide additional
awareness to manned aircraft.
Figure 2. ADS-B Virtual Air Radar with RTL-SDR. YouTube user Superphish.
Category 2: for BLOS flights that remain below 400’ AGL, the
UAS will be below the minimum altitude for most fixed-wing aircraft. However,
helicopters are permitted below 500’ AGL. To increase aircraft separation for
BLOS flights and flights at night (Category 2 and Category 1 operating with a
waiver) a low-cost ADS-B transceiver is recommended. A commercial-off-the-shelf
solution from uAvionix brings full ADS-B capabilities to sUAS. Their ADS-B
transceiver weighs only 20 grams but is capable of transmitting a 20 watt ADS-B
UAT signal (uAvionix, 2016), alerting all ADS-B-equipped aircraft within 20
nautical miles. The receiver is also sensitive to manned aircraft signals
within 100 nautical miles. Using open-source autopilot platforms, various
alerts can be configured to provide sUAS pilots with near-TCAS capability. Even
more exciting is the potential for programmed automatic responses to manned
aircraft in the vicinity i.e. “hover” or “loiter” in place if a manned aircraft
signal is received within 1 NM of the UAS.
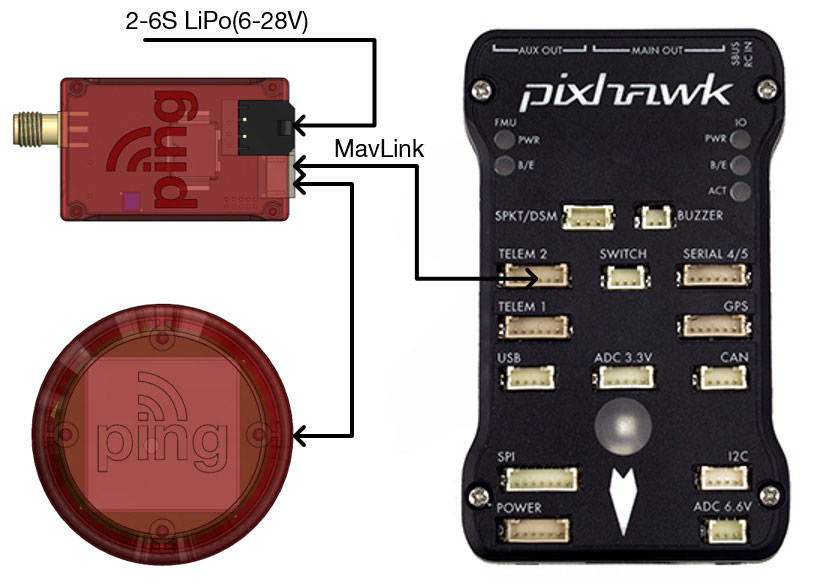 |
| Figure 3. PINGNAV-2020. uAvionix: http://www.uavionix.com/wp-content/uploads/2016/04/pingnav_ping2020_pixhawk_autopilot.jpg |
Category 3 and 4: as all UAS that operate above 500’ AGL
will potentially share airspace with manned aircraft, there is a high
probability that ADS-B will be required equipment. Sagetech is another company
that produces transponders and ADS-B transceivers for UAS, with the advantage
that most of their products are designed to FAA technical service order (TSO)
standards (Sagetech, nd).
Conclusion
To date, a large number of operating UAS originated from
hobby-grade equipment and hobby-grade technology. To successfully integrate UAS
into the NAS and ensure separation from manned aircraft, it will benefit UAS
operators and manufacturers to select equipment that is compatible with manned
aircraft systems and compliant with manned aircraft regulations.
References:
Elias, B. (2016, January). Unmanned aircraft operations in domestic airspace: U.S. policy
perspectives and the regulatory landscape. Congressional Research Service:
Washington, D.C. Retrieved from https://www.fas.org/sgp/crs/misc/R44352.pdf
Federal Aviation Administration. (2011, February). Introduction to TCAS II version 7.1. U.S.
Department of Transportation: Washington, DC. Retrieved from http://www.faa.gov/documentLibrary/media/Advisory_Circular/TCAS%20II%20V7.1%20Intro%20booklet.pdf
RTL-SDR. (2013, April). RTL-SDR
tutorial: cheap ADS-B aircraft radar. Retrieved from http://www.rtl-sdr.com/adsb-aircraft-radar-with-rtl-sdr/
Sagetech. (n.d.) XP
family of transponders. Retrieved from https://sagetechcorp.com/xp-transponders.html
Strain, R.C., DeGarmo, M.T., and Moody, J.C. (2007). A lightweight, low-cost ADS-B system for UAS
application. MITRE Corporation: McLean, VA. Retrieved from https://www.mitre.org/sites/default/files/pdf/07_0634.pdf
uAvionix. (2016). Ping-2020
ADS-B transceiver data sheet [Brochure]. Retrieved from http://uavionix.com/downloads/ping2020/docs/uAvionix-ping2020-data-sheet-ap0.pdf